Display/stabiliser built by W6JFR
(Click on image to see more)
The Display/Stabiliser unit displays the signal frequency on a Hitachi LCD module.
A PIC16F84 microcontroller is used to control the display module, provide the
necessary pulses for the counter gate and reset circuits, and to send a correcting
voltage back to the VFO to eliminate frequency drift.
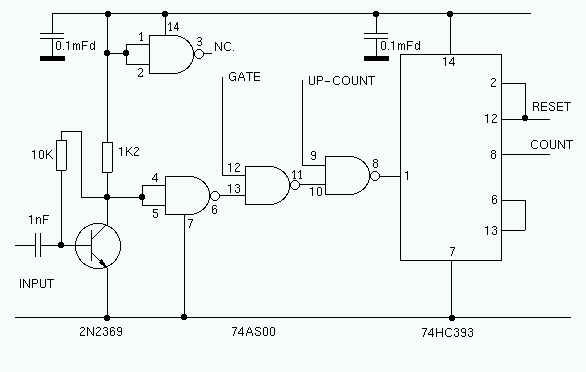
INPUT AMP/GATE/COUNTER
The signal from the VFO is amplified by a 2N2369 transistor. One section of a
74xx00 quad NAND gate is used as a buffer, the next pair of NAND gates are used
as counter gates. The counter gate time is 100mS, giving a resolution of 10Hz.
A 74xx393 is used for the least significant 8 bits of the 24 bit counter. The
remaining 16 bits are counted by the PIC internal counter (RTCC) and the PIC's
internal prescaler. As you can see in the schematic, the circuit hardware is very
simple. All of the clever stuff is handled by software.
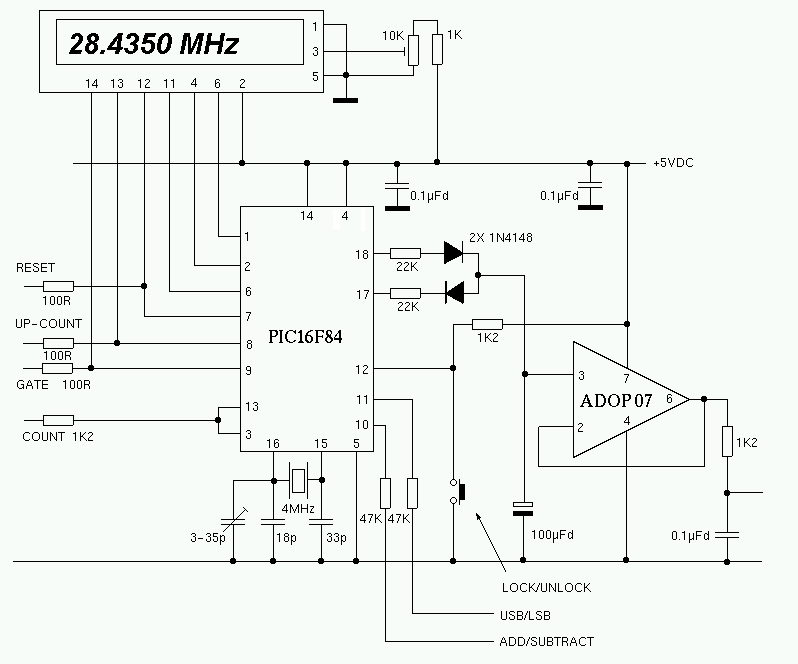
The square wave signal from the first counter
is fed to the RTCC (Real Time Clock Counter) input of the PIC. The value in
the external counter can not be read directly. A simple trick is used to read
the value in the external counter. After the counter gate is closed, the PIC
increments the external counter by sending pulses to the secondary counter gate
(pin 9 of the 74xx00). By counting the number of pulses required to overflow
the counter, it is a simple matter to calculate the value that was in the counter
at the time the gate was shut. A similar method is used to determine the value
in the PIC internal prescaler. The final (most significant) 8 bits of the count
can be read directly from the PIC's internal RTCC register. For more information
about the PIC16F84, download the data sheet from: Microchip.
When the frequency is stored in the PIC, the IF offset is added or subtracted.
This kind of simple arithmetic can be done quickly and easily with a PIC. The
binary number is then converted to BCD and sent one digit at a time to the LCD
display. This entire process takes just a few milliseconds. Once the count result
has been sent to the LCD display, the counters are reset, and the gates are
opened for the next count.
When the LOCK button is pressed, the current
count is stored in the PIC's internal registers. This value is compared to the
next count, and all subsequent counts. If the VFO has drifted, the most recent
count result will not be the same as the stored number. If the VFO drifts up
in frequency, a negative correction pulse is generated to correct the drift.
If the VFO drifts downwards, a positive pulse is generated. The pulses are converted
to a slowly changing DC voltage by an op-amp integrator circuit. The choice
of op-amp is quite critical. I use an ADOP07CN. A form of PWM (Pulse Width Modulation)
is used to give proportional control of the VFO. If the drift is small, a small
(narrow) correcting pulse is sent to the integrator. If the drift is large,
wider correcting pulses are used. The correcting voltage is applied to a varicap
diode in the VFO. The VFO should be arranged so that a DC voltage ranging from
1V to 4V, will shift the VFO frequency by +/- 1KHz.
For a more comprehensive description of the circuit,
see: Elektor magazine for Feb. 1998.